Aérateur Mécanique Contrôlé
Une ventilation contrôlée en température et humidité par SHT-3x et Arduino Nano
Depuis que j'ai changé la porte du garage, l'étanchéité est telle que l'humidité des murs enterrés, lors d'épisodes pluvieux, sature l'atmosphère et le rend mal sain pour ce qui y est entreposé. J'ai donc dû réagir en ajoutant une extraction mécanique contrôlée . Contrôlée en température, pour ne pas geler le local et contrôlée en humidité pour en baisser le taux, si celui-ci devient trop élevé . J'avais un tuyau de 100mm qui rentrait dans une cheminée et qui ne servait à rien; il suffit juste d'un peu d'électronique et d'une imprimante 3D pour qu'il devienne opérationnel comme évacuation de l'air chargé .
Donc les critères imposés sont de respecter une température consigne, réglable par un potentiomètre (multi-tours) afin de ne pas ventiler si la valeur est plus basse que celle qui est réglée en arrêtant le ventilateur électrique et en obturant l'orifice d'évacuation . Deuxième condition à respecter: si le taux d'humidité est inférieur à 60% on coupe l'extraction forcée tout en laissant la circulation d'air ouverte . Voilà pour le cahier des charges .
Pour une fois commençons par voir la mécanique :

Voici l'ensemble des pièces assemblées, de la droite vers la gauche, on retrouve :
- Un manchon d'adaptation au diamètre de l'évacuation avec un petit jeu de montage et sur l'autre côté, une face de liaison avec le ventilateur la plus étanche possible et incluant les trous de fixation par vis traversantes ....
- Un ventilateur de récupération sur un vieux rack, baie, ou console de jeu... de diamètre sensiblement égal à l'évacuation et surtout silencieux ! J'ai opté pour un modèle de 90 mm et en 220 volts, asynchrone, car plus facile à trouver et ne chargeant pas l'alimentation 5 volts du montage
- Un tube intermédiaire entre l'autre face du ventilateur et le volet mécanisé; ce tube à l'empreinte du ventilateur d'un côté, en respectant une étanchéité soignée également, et un diamètre de 100 mm de l'autre côté pour éviter les réductions qui sont sources de pertes en charge, de turbulences, de bruits et donc de rendement perdu .
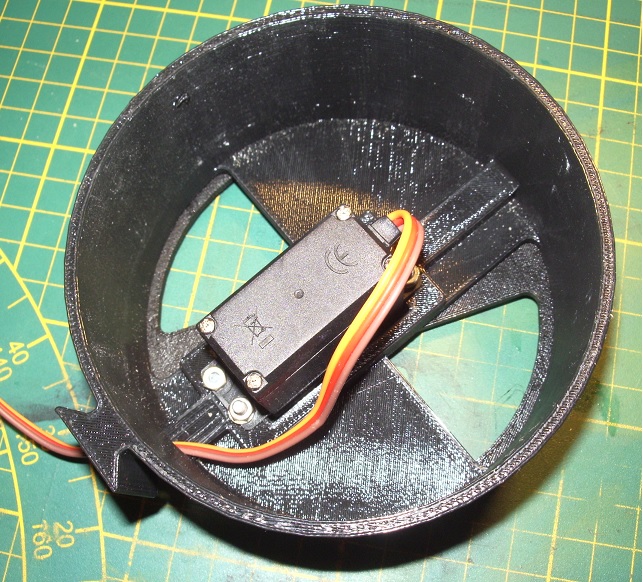
- Un volet mécanisé qui s'emboîte sur ce tube. Le corps est composé d'une partie fixe avec deux larges trous pour laisser passer l'air et assurer aussi la rigidité mécanique pour maintenir fermement la motorisation. La partie mobile du volet présente des ouvertures complémentaires pour venir ou non en coïncidence avec celles du support . La motorisation est faite par un servo-moteur de modélisme, alimenté par le 5 volts de l'électronique, qui va pivoter le volet de 0 à 90 degrés.
- Pour finir, un petit boitier va enfermer et protéger toute l'électronique qui commande le montage. Un ajourement a été aménagé pour laisser circuler l'ai jusqu'à la sonde de mesure; un autre permet de visualiser les données de l'afficheur Oled et un trou donne l'accès au potentiomètre de réglage de la valeur de température consigne . La fermeture de la boite et le maintient du circuit se fait par vis/écrou de 4 x 35 mm traversant chaque élément de part en part ...
L'ensemble des pièces :

Le volet mécanisé, les supports et le ventilateur :

Tous les fichiers 3D nécesaires à la réalisation de la partie mécanique, sont dans le zip au bas de l'aticle .
Et pour gérer tout ça:
Le (s) schéma (s):
J'ai ajouté un éventuel "s" à schéma, car j'ai développé 3 versions suivant les sensibilités de chacun et la difficulté d"approvisionnement du matériel et composants :
- Aéro_sch : Ce schéma utilise un capteur "one wire" de type DTH-11 et pour la partie commande de ventilateur un triac, avec charge fictive, interfacé par un moc 3021...
- Aéro_sch1: Ce schéma utilise un capteur "one wire" de type DTH-11 et pour la partie commande de ventilateur un relais statique Omron (tellement plus simple mais pas toujours disponible dans les fonds de tiroirs) ...
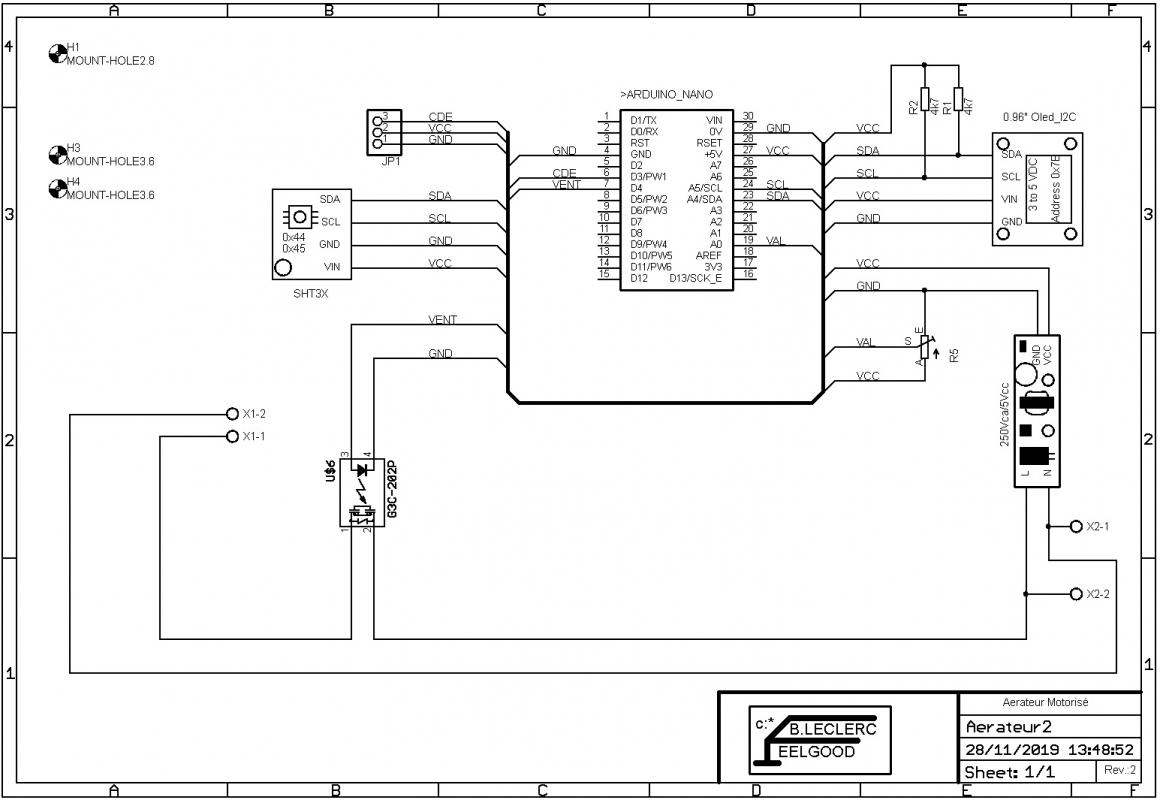
- Aéro_sch2: Ce schéma utilise un capteur I2C de type STH-3x et pour la partie commande de ventilateur un relais statique Omron (c'est la version commentée ci-dessous ) ...
Comment ça marche ?
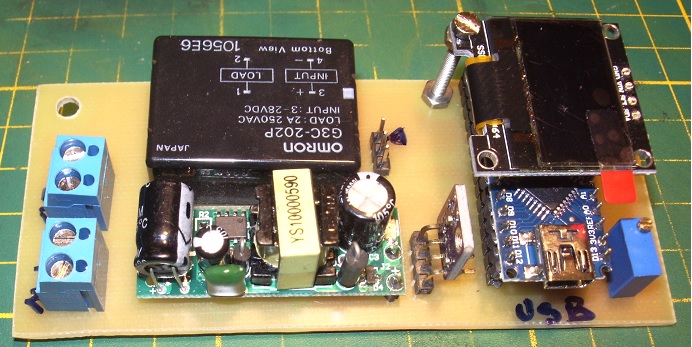
En bas, à droite du schéma, on alimente le circuit avec une tension de 190 à 250 volts AC qui va être réduite par un module à découpage ( moins de 2€ chez Aliexpress) pour nous fournir du 5 VDC nécessaire à tout ce qui est raccordé sur le CI ... Le 250 VAC s'en va également sur le relais statique pour apporter l'énergie au ventilateur à travers l'opto-triac contenu à l'intérieur et le faire tourner si la commande le demande ...
On alimente un Arduino Nano en 5VDC qui va s'occuper à dispatcher et traiter les différentes informations; l'écran Oled de 0,96 pouce, la sonde I2C SHT-3x et le servo-moteur ! Un potentiomètre (R5) multi-tours de 1K, pris entre VCC et le 0 volt, va donner une valeur analogique à l'entrée A0 du Nano, ce qui permet de définir le seuil de température consigne où l'aérateur entre en fonction .
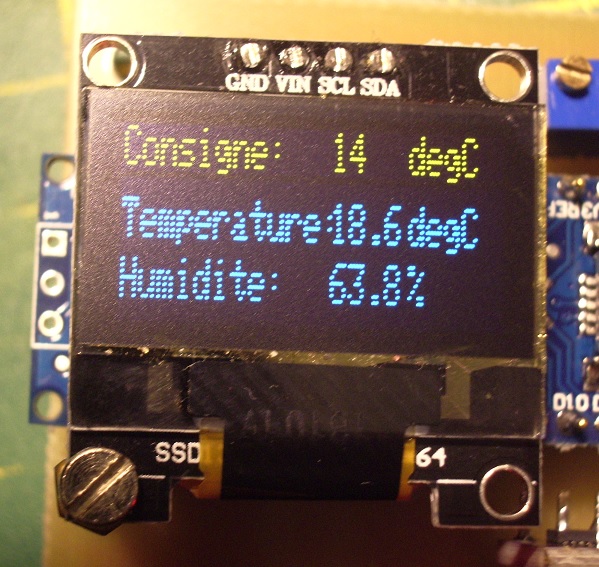
L'afficheur Oled 0,96' 128x64 (2,74€ chez Aliexpress) va nous permettre de visualiser la valeur consigne, la température et l'hygrométrie de la pièce. Cet écran est alimenté entre 3 et 5,5 volt et se pilote par deux lignes I2C à l'adresse 0x78 par défaut (et modifiable 0x7A) . Deux résistances de 4K7 viennent en Pull-Up du bus ; peut-être sont elles déjà incluses sur les capteurs et éléments connectés: je n'ai pas essayé sans !
Un connecteur (JP1) permet de raccorder le servo-moteur (CDE-VCC-GND) La sortie du micro contrôleur utilisée est une sortie PWM (modulation de largeur d'impulsion) pour que le signal ait un rapport cyclique variable, ce qui va se traduire par une position angulaire proportionnelle du rotor.
Sur ce modèle, j'utilise un capteur Température / Hygrométrie de type SHT-3x en bus I2C également avec une adresse par défaut 0x44 (modifiable en 0x45 ) et dont la tension d'alimentation va de 2,5 à 5,5 volts . Pour un prix raisonnable de 1,86 € chez Aliexpress ! On peut monter en précision en choisissant le modèle SHT-32 mais cette application ne le justifie pas .

Sur ce schéma, j'utilise en sortie pour le pilotage du ventilateur, un relais statique de récupération de type Omron G3C-202P qui est asservi à une sortie (D4) en Tout ou Rien et qui vient exciter l'entrée du relais (de 3 à 18 volt) : c'est très pratique à utiliser car très souple ! Rien n'empêche d'utiliser les composants MOC + Triac des autres schémas ou un relais classique en faisant attention au pouvoir de coupure (tension et intensité), au courant de la bobine (limité à 40 mA et 5 volts sur la sortie de l'Arduino) et ne pas oublier de découpler la bobine par une diode de roue libre si elle n'est pas incluse dedans .
Le circuit Imprimé :
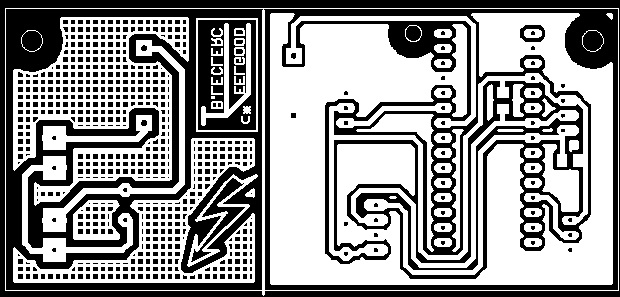
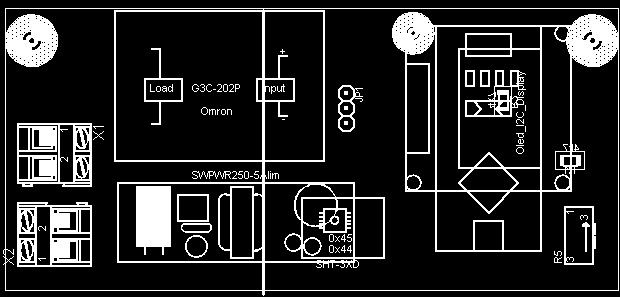
Le circuit imprimé (50 x 110) est sorti sous EAGLE Cadsoft et facilement ré-importable sur n'importe quel autre logiciel digne de ce nom, pour des modifications ou personnalisations .Pour des raisons de réalisation à la portée de l'amateur, je m'arrange toujours pour que ce soit un circuit simple face ...bien que les asiatiques réalisent du multi-couches de très bonne qualité pour quelques Euros; le souci c'est le délai de transport ....Les typons sont disponibles dans le zip situé au bas de la page . Le perçage est à 1 mm sauf pour le relais et les deux borniers (1,5 mm) .
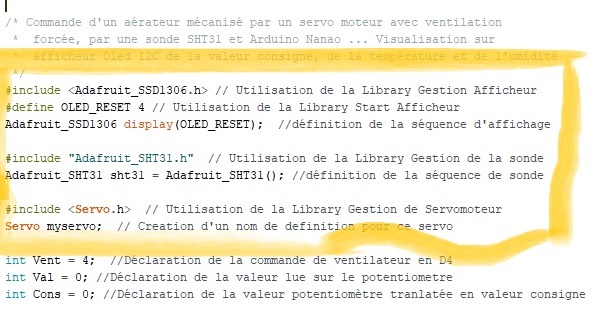
Le logiciel :
Le programme, développé avec l'IDE Arduino est largement documenté pour imaginer ce que j'ai voulu faire; Des bibliothèques de gestion des composants, qui ont fait leurs preuves, sont disponibles sur la toile, donc pourquoi réinventer le monde, il suffit de les appeler et de déclarer les personnalisations dont nous avons besoin pour telle ou telle application (Vive le freeware) .
Dans le Zip des fichiers de réalisation, j'ai inclus également les programmes pour les versions utilisant un capteur "one wire" DTH-11... Je suis en cours d'expérimentation car ce capteur est arrivé beaucoup plus tard que le SHT-3x ; C'est pourquoi sur les SW joints, il suffira de valider les lignes qui gèrent le DTH-11 et tout cela devrait fonctionner sans problème ...
L'extrusion du plastique:
Comme décrit plus haut, les pièces mécaniques sont réalisées à l'imprimante 3D; J'ai volontairement réalisé ceci en plusieurs morceaux pour permettre une adaptation, si il devait y avoir des modifications pour rendre compatible l'aérateur avec les cas de chacun et la nature des cheminées d'évacuation . Le programme utilisé pour la création des pièces est DesignSpark Mecanical , logiciel puissant et surtout gratuit de chez Radiospares (et quand on a une habitude avec quelque chose qui donne satisfaction, pourquoi se farcir la prise en main d'autre chose ); donc ça peut servir: les sources sont jointes dans le ZIP pour ré-exploitation . Le fil utilisé est du PLA de 1,75 mm, chauffé à 210° sur un plateau à 55°. La densité de remplissage reste faible vu le peu de contraintes mécaniques imposées aux supports.
.
Les différents fichiers pour la réalisation:
![]() Aerofile (609.72 Ko)
Aerofile (609.72 Ko)
Après mise en place et essais:
L'Aérateur donne pleine satisfaction ! vite monté et opérationnel sans problème majeur, juste une prise électrique à tirer à proximité mais j'en avais besoin pour le chargeur du vélo et occasionnellement de la moto ... Ah si, j'oubliais! j'ai dû sortir la sonde du boitier,car la faible chaleur dégagée par les équipements électroniques inclus à l'intérieur était suffisante pour fausser les mesures ... Ce qui se traduit par une nappe de 4 fils de 10 cm sous gaine thermo et scotchée sur l'arrière du corps de l'appareil .
Ajouter un commentaire
 Français
Français
 English
English